Chapter 7 Definition
Rigid means the different points of the body maintain their seperation
7.1 Torque and Angular Momentum for Systems of Particles
We had for a single particle
where G=r× F (the torque) and L=r× p (the angular momentum).
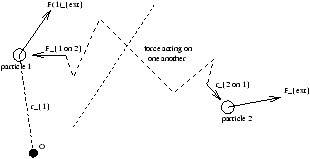
For particle 1: G1=r1× F1ext+r1× F12+r1× F13+...
For particle 2: G2=r2× F2ext+r2× F21+r2× F23+...
G (total torque)=G1+G2+...
Clearly this sum will involve terms like
r1× F12+r2× F21
but by Newton III F12=F21=f say that the contribution of such terms is
(r1-r2)× f
but (r1-r2) is parallel to f so
(r1-r2)× f=0
similar terms also vanish leaving
Gtotal=r1× F1ext+r2× F2ext+...
now we use Newton II F1ext=p1
| Gtotal=r1× p1+r2× p2+... = |
|
[r1× p1+r2× p2+... ]= |
|
[L1+L2+... ] |
Ltotal=L1+L2+...
note that for single particles Gtotal and Ltotal depend on the choice of origin
7.2 Calculation of Angular Mementum for a Rigid Body
Note for a single orbiting particle
 G
G is not zero and
L is not constant
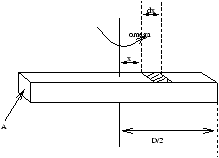
Consider a rigid body rotating at a rate, w , about a fixed axis. Restrict to bodies that are uniform along the axis of arbitrary cross-section.
Rigid implies that all points rotate about the axis with equal angular speed dq/dt=w .
Choose the origin on the axis half way up the body. A typical volume element dV has mass r dV , where r is the mass density (which is uniform here). Therefore the contribution to angular momentum
dL=r× (dmv)=r r× rdV
Integrated over the body, becuase of the choice of origin, the horizontal component of Ltotal vanishes. If x is radial distance fram axis then
|v|=v=w x
and
|r× r|=|r||v|sin q =w x2
so
| L |
total= |
ó
õ (w x2)r dV=w I |
7.3 Examples of Moments of Inertia
7.3.1 Rotating Rod
Uniform bar (rod) length D , sectional area A , rotating about its centre of mass
where dV=Adx and dm=r (Adx)=r dV
But since rod is uniform
eg. no external torque acting
Ltotal=Iw =constant
so a skater can increase w by changing D and hence I
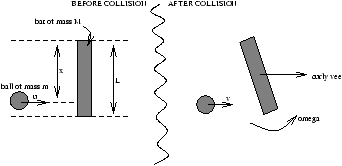
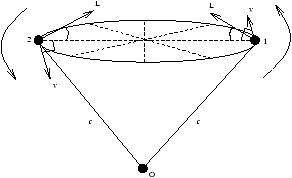
7.3.2 Ball Hitting Bat (exam April 1999)
from the last example
| I(about centre of mass)= |
|
ML2 |
mu=mv+M
Conservation of angular momentum (the origin is at the centre of mass of the bat because the bat is uniform the centre of mass is at the centre of the bat)
NB the ball has angular momentum as it is offset from the centre of the bat
where (mu-mv)=M . The velocity of the handle is equal to zero (when does this special case occur?)
and this is the most comfortable position to hit the ball (know as the centre of percussion)
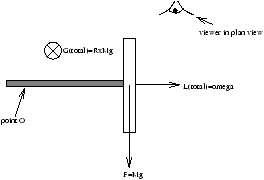
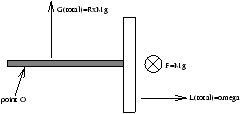
7.3.3 A Flywheel (or gyroscope)
view from above
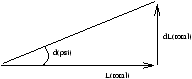
Now Gtotal=d/dtLtotal , in time dt
dLtotal=Gtotal× dt
this is the rate the flywheel progresses when released with point O fixed, known as the processional angular frequency. Also the value of W can be obtained by: