Chapter 6 Basis
1-D: x, x=v, x=a, F
3-D: r,v=r, a=r, F
6.1 Work in 3-D
Recall 1-D: dW=Fdx , the work-energy theorem states that the work done by a force is equal to the changle in kinetic energy.
In 3-D its only the component of F along dl that contributes to the change in kinetic energy.
dW=F.dl=Fxdx+Fydy+Fzdz
So the total work in moving the particle from A to B along a particular path is
| W= |
ó
õ |
|
F.dl (along the path) |
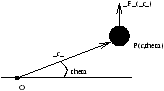
Consider a position dependent force ie the force vector F=F(r)¹ F(v)¹ F(t)
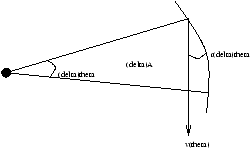
For F=F(r) consider components of F that are parallel and orthogonal to r . Tangential force (Fq.r=0) appears to turn the particle about O . What is the work done in rotating the particle from q to q+dq .
dW=Fxdx+Fydy=(turning effect)× dq ]
however |dl|=rdq
dx=-tdq × sin q =-ydq
dy=rdq × cos q =xdq
dW=-Fxydq +Fyxdq =[xFy-yFx]dq =(r× F)zdq
Define Torque as G=r× F but F=p so
however dr/dt=v; p=mv so dr/dt× p=0
where L=r× p is the Angular Momentum
Notes:
-
G=d/dt(r× p)=L says that the torque equals the rate of change of momentum which is the angular analogue of Newton II
- although we have derived G and L using Fq a radial force component of Fr does not contribute as r× Fr=0
6.1.1 Radial Forces
Now F=f(r)r
Examples of forces dependent on the magnitude of r :
-
gravity: f(r)=-GmM/r2
- coulomb: f(r)=Q1Q2/4p e 0r2
- 3d-spring: f(r)=-kr
ie. forces at r originate from a source at the origin - Central Forces
Since the force is radial it has no turning effect about O (the source point)
ie. r× F=r× f(r)r=0 where F is purely radial so L=r× p=constant
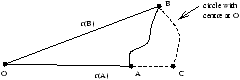
For central forces the angular momentum is conserved [when we choose our origin to be the source point of the central forces]. For central forces the work done in moving from A to B is independent of the path taken
This is the definition of potential fir 3D forces (conservative ones)
| |
ó
õ |
|
F× dl |
= |
ó
õ |
|
m |
|
× dl |
= |
ó
õ |
|
m |
|
× dv |
= |
ó
õ |
|
mvdv= |
|
mvB2- |
|
mvA2 |
| |
ó
õ |
|
F× dl=[ke @ B]-[ke @ A] |
v2=v× v=vx2+vy2+vz2
2vdv=2v× dv=2vxdvx+2vydvy+2vzdvz
6.1.2 Work-Energy Theorem in 3D
| W= |
ó
õ |
|
F× dl=-U(B)+U(A)=[ke @ B]-[ke @ A] |
E=(KE)A+U(A)=(KE)B+U(B)
conservation of mechanical energy in 3D
6.1.3 For Reference (see Prof. New's Maths Course)
| |
F× dl=0 Û × F=0 [for central force] |
Calcuating òABF× dl
| |
ó
õ |
|
F× dl |
= |
ó
õ |
|
F× dl |
+ |
ó
õ |
|
F× dl |
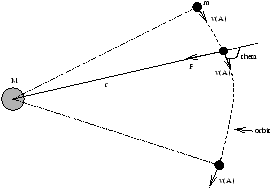
6.2 Orbits of Particles under Central Forces (eg gravity)
Regard M» m
Work done by gravity in going from A to B
| W= |
ó
õ |
|
æ
ç
ç
è |
- |
|
ö
÷
÷
ø |
dr= |
|
- |
|
[=-U(B)+U(A)] |
L=r× mv=constant for central forces
-
since the direction of L is constant, motion is planar
-
|L|=|r× mv|=mrvsin f
| KE= |
|
mv2= |
|
m[v2cos2f +v2sin2 f]= |
|
m[r2+ |
|
] |
-
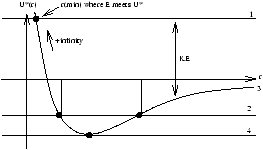
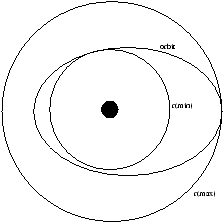
there is a minimum value of r and the particle can escape to infinity
- particle confined between two points (ie bound)
- particle just escapes to ¥ (E=0)
- F=Umin* a circular orbit is only where this can occur
Once masses have been specified the angular momentum determines U*(r) . The total energy then determines the orbit
when E=U*(r) we have r=0
Case 1
with r=0
| rmin= |
|
± |
|
. |
æ
ç
ç
è |
(GmM)2+ |
|
ö
÷
÷
ø |
|
= |
|
[1± |
æ
ç
ç
è |
(1+ |
|
ö
÷
÷
ø |
|
] |
Case 2
same equation as before, however as E is negative theco-efficient than becomes positive orbit is constrained between the limits rmin and rmin
Actual orbit turns out to be an ellipse, so we can work out the major axis (rmax+rmin)=GmM/E . In cartesian x2/a2+y2/a2(1-e2=1 .
If e (the eccentricity of the ellipse) is equal to zero then you get a circle, however if it is one then you get a line. The value of e lies between 0 and 1.
rmin/max=a(1 e)
compare to orbit formula
where:
-
rmin
- is the perihelim
- rmax
- is the aphelion
Case 3
Case 4
set ¶ U*/dr=0 -L2/mr3+GmM/r2=0
orbital period is
6.2.1 Notes
-
closed orbit (elliptical) is a feature of 1/r potential. Other force laws also give bound orbits, but unclosed.
- deviations from ellipse mean
-
take account of other bodies
- inverse square law is wrong! - but only very slightly wrong (due to relativistic effects)
- for E³ 0 trajectory is a parobala
so
-
E>0; e>1 hyperbola
- E<0; 0<e<1 ellipse
- E=0; e=1 parabola
- E=-G2m3M2/2L2; e=0 circle
6.3 Kepler's Laws (empirical)
-
planets more in ellipses with the sun at a focas
- equal areas are swept out in equal times
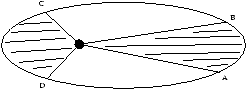
the area swept out is the time from A to B is equal to the area swept out in the time from C to D
so
ie dA/dt is a constant
- period and length for a closed loop orbit are related by
T2µ L3
where L is the radius of the cicular orbit or the semi-major axis (any scale distance)