Chapter 4 Motion
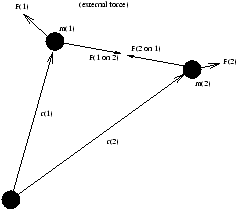
m1r1=F1 on 2+F1external
m2r2=F2 on 1+F2external
But F1 on 2=-F2 on 1 by Newton III
m1r1+m2r2=F1external+F2external=Fexternal
Define
where M=m1+m2
MR=m1r1+m2r2=Fexternal
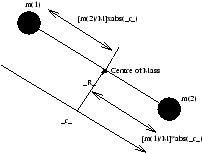
R defines the centre of mass of m1 and m2 and the centre of mass follows Newtons II law with respect to the external force; blind to the internal force.
eg External Force = Uniform Gravity
MZ=m1g+m2g=Mg
Z=g
Internal Motion
Set Fexternal=0 so it is an isolated system
Þ MR=0 Þ MR=k
therefore this is true and momentum is conserved in an isolated system.
Now
m1r1=F1 on 2º Finternal
m2r2=F2 on 1=-F1 on 2
| Þ r2-r1= |
|
- |
|
= |
æ
ç
ç
è |
|
|
+ |
|
|
ö
÷
÷
ø |
Finternal |
µ r=Finternal
where:
-
r
- is the related coordinate (r2-r1)
- µ
- is the recipical of m1+m2=m1m2/m1+m2 which is the reduced mass
r is the relative serperation
eg for a spring Finternal=-kx Þ µ x=-kx
SHM with angular frequency w 02=k/µ=k/m1m2(m1+m2)
this can be used to calculate the ratio of the natural frequencies of H2 and HCl
4.1 One Dimensional Collisions
-
2 particles only
- internal force acts for a very short time
- physical interaction is not essential, for example Coulomb Repulsion
Choose a frame in which:
-
particles approach to each other is along a stationary straight line
- x-axis is a line to this (along) line
We define a one dimensional collision as a collision that takes place along a line and they seperate along the line.
m1x1=-Finternal
m2x2=+Finternal
m1x1+m2x2=constant
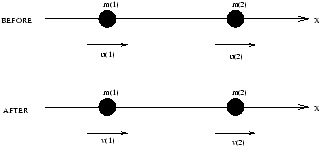
m1u1+m2u2=m1v1+m2v2
If Finternal is a conservative force, then the total energy in the system is conserved
E=K+U
Hard collisions are examples of many collisions where U acts over a short range (eg billiard balls) so that (except for the short contact time)
Kinitial=Kfinal
in which case
| |
|
m1u12+ |
|
u2u22= |
|
m1v12+ |
|
m2v22 |
When given the initial velocities (u1, u2) calculate the final velocities (v1, v2)
consider kinetic energy ® m1(v12-u12)=m2(u22-v22)
consider the momentum ® m1(v1-u1)=m2(u2-v2)
NOTE: (A12-B12)=(A1-B1)(A1+B1)
by dividing:
v1+u1=v2+u2
v1-v2=-(u1-u2)
We can now use this information to solve for v1 and v2
4.1.1 Special Case: Stationary Target
u2=0
If m1=m2 v1=0 and v2=u1 so therefore 100% energy transfer
m1>m2 v1>0 and v2>0
m1<m2 v1<0 and v2>0
m1« m2 v1=-u1 and v2=0 (brick wall rebound)
4.1.2 Special Case: Equal but Opposite Initial Velocities
At what velocity does the lighter mass recoil when u1=-u2 ?
where r =m1/m2
m1» m2 v2=3u
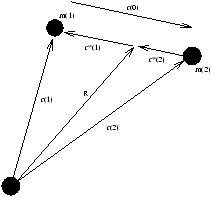
4.1.3 Centre of Mass Frame
The centre of mass frame is a frame in which the coordinates of the partile are measured relative to the centre of mass.
Centre of mass coordinates: r1*=r1-R and r2*=r2-R
where R is the position of the centre of mass
velocity of mass m1 in the centre of mass frame
r1*=r1-R
V1*=v1-V
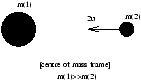
Example
Two bodies collide ellastically with equal and opposite velocity u and -u . Show that the lighter mass cannot recoil with speed greater than 3u .
V~ u
Þ u1*=u1-V=u-u=0
Þ u2*=u2-V=-u-u=-2u
In the centre of mass frame we have a brickwall rebound.
ie v2*=+2u
Transform this back to the lab frame
v2=v2*+V=+2u+u=3u
4.1.4 Inelastic Collisions
Kinetic energy is now no longer conserved
Kf<Ki
Coefficient of Restitution
v2-v1=(u1-u2)e
where 0³ e£ 1 , if e=1 then collision is totally elastic, however if e=0 then the collision is totally inelastic (putty like).
Combine this with the conservation of momentum equation and solve for v1 and v2
| v1= |
| m1u1+m2[u2+e(u2-u1)] |
|
| m1+m2 |
|
| v2= |
| m2u2+m1[u1+e(u1-u2)] |
|
| m1+m2 |
|
| v2= |
æ
ç
ç
è |
|
|
|
ö
÷
÷
ø |
u= |
æ
ç
ç
è |
|
|
|
ö
÷
÷
ø |
u |
4.2 Center of Mass Frame (in general)
r=r2-r1
Solve for r1 and r2 in terms of R and r
MR=m1r1+m2r2
m2r=m2r2-m2r1
MR=m2r=(m1+m2)r1
4.2.1 Momentum in a Centre of Mass Frame
The position of the mass m1 in the centre of mass frame is r1*=r1-R
The momentum in the in the centre of mass frame for the mass m1
m1r1*=m1(r1+R1)
by using the general equations of centre of mass
p2*=m2r2*=µ r
Total momentum p1*+p2*=0 . In a centre of mass frame the total momentum of the system disappears.
4.2.2 Kinetic Energy in a Centre of Mass Frame
for mass 1:
for mass 2:
so the total kinetic energy in a centre of mass frame
| K*=K1*+K2*= |
|
( |
|
+ |
|
)|r|2µ 2= |
|
µ -1|r|2µ 2= |
|
µ |r|2 |
Working in one dimension:
r ® x1
r1 ® x1 etc ...
r ® x º x2-x1
same for velocities:
The lab kinetic energy:
| K= |
|
m1x12+ |
|
m2x22= |
|
m1(X- |
|
x)2+ |
|
m2(X+ |
|
x)2= |
|
(m1+m2)X2- |
|
xX+ |
|
Xx+ |
|
m1 |
æ
ç
ç
è |
|
|
ö
÷
÷
ø |
|
x2+ |
|
m2 |
æ
ç
ç
è |
|
|
ö
÷
÷
ø |
|
x2 |
| K= |
|
[ |
|
× µ 2+ |
|
× µ 2]x2= |
|
[ |
|
+ |
|
]µ 2x2 |
4.2.3 Example
Calculate the change in kinetic energy for an inelastic one dimensional collision
Method 1: Lab Frame
| D K=Kbefore-Kafter= |
|
m1(u12-v12)+ |
|
m2(u22-v22) |
m1u1+m2u2=m1v1+m2v2
resititution:
v2-v1=e(u1-u2)
now solve simultaneously for v1 and v2 and then substitute into D K ¾® NASTY!!!!
Method 2: Centre of Mass Frame
Kbefore=KCoM+Kbefore*
Kafter=KCoM+Kafter*
D K=Kbefore*-Kafter*
given K*=1/2µ |r|2
| Kafter*= |
|
µ (v1-v2)2= |
|
µ e2(u1-u2)2 |
| D K= |
|
µ (u1-u2)2(1-e2)= |
|
æ
ç
ç
è |
|
|
ö
÷
÷
ø |
(u1-u2)2(1-e2) |
4.3 Rocket Motion
Two Body - Rocket and Fuel. In an isolated system momentum is conserved, therefore constant; from Newton II we get
for a rocket in space F=0 however dv/dt¹ 0 so dm/dt¹ 0 in this case.
Fuel is ejected from the rocket with velocity -Vex relative to the rocket. Therefore the lab observer sees the exhast to move with velocity v-vex (cf Young and Freedman page 250, this reference has the exhaust arrow in the wrong direction).
Momentum conserved:
p(t)=mv
p(t+dt)=(m+dm)(v+dv)-dm(v-vex)=mv+mdv+vdm+(dmdv)-vdm+vexdm
we ignore (dmdv) as it is second order and so very small.
mv=mv+mdv+vexdm
mdv=-vexdm
If we divide by dt then this expression has the dimensions of force, the thrust of the system
rearranging:
however vex is a constant
but ln X=-ln 1/X
the initial fuel mass (mi-mf)
-
speed boost (vf-vi) depends on vex but is independent of the burn rate ( dm/dt )
- in practive vex£ 4kms-1 for chemical based rockets, this is about the limit for chemical rockets
- vf can exceed vex
4.3.1 Rockets in the Presence of Gravity - Launch Vechicles
Assume gravity doesn't vary with height
by Newton II
Fext=-mg
| |
|
= |
|
[ |
| (m+dm)(v+dv)-dm(v-vex)-mv |
|
| dt |
|
]=-mg |
| vf-vi=-vex.ln |
æ
ç
ç
è |
|
|
|
ö
÷
÷
ø |
-gt |
| vf-vi=vex.ln |
æ
ç
ç
è |
|
|
|
ö
÷
÷
ø |
-gt |
Thrust>Weight